C4 summary

Chapter 1 summary - Partial Fractions
- An algebraic fraction can be written as a sum of two or more simpler fractions. This technique is called splitting into partial fractions.
- An expression with two linear terms in the denominator such as \displaystyle{11\over (x-3)(x+2)} can be split by converting into the form \displaystyle{A\over (x-3)} + {B\over (x+2)} .
- An expression with three or more linear terms such as \displaystyle{4\over (x+1)(x-3)(x+4)} can be split by converting into the form \displaystyle{A\over (x+1)} + {B\over (x-3)} + {C\over (x+4)} and so on if there are more terms.
- An expression with repeated terms in the denominator such as \displaystyle{6x^2-29x-29\over (x+1)(x-3)^2} can be split by converting into the form \displaystyle{A\over (x+1)} + {B\over (x-3)} + {C\over (x-3)^2} .
- An improper fraction is one where the index of the numerator is equal to or higher than the index of the denominator. An improper fraction must be divided first to obtain a number and a proper fraction before you can express it in partial fractions.
- For example, \displaystyle{x^2+3x+4\over x^2+3x+2} = 1 + {2\over x^2+3x+2} = 1 + {A\over (x+1)} + {B\over (x+2)} .
Chapter 2 summary - Coordinate geometry in the (x,y) plane
- To find the cartesian quation of a curve given parametrically you eliminate the parameter t between the parametric equations.
- To find the area under a curve given parametrically you use \displaystyle\int y {{\rm d}x\over {\rm d}t}{\rm d}t
Chapter 3 summary - The Binomial Expansion
- The binomial expansion
\displaystyle (1+x)^n = 1 + nx + {n(n-1)x^2\over 2!} + {n(n-1)(n-2)x^3\over 3!} + ...
can be used to give an exact expression if n is a positive integer, or an approximate expression for any other rational number.
-
(1+2x)^3 = 1 + 3(2x) + 3 \times 2 {(2x)^2\over 2!} + 3 \times 2 \times 1 {(2x)^3\over 3!} + 3 \times 2 \times 1 \times 0 {(2x)^4\over 4!}
\qquad\qquad = 1 + 6x + 12x^2 + 8x^3
(Expansion is finite and exact.)
-
\sqrt {(1-x)} = (1-x)^{1\over 2} = 1 + {1\over 2}(-x) + \left({1\over 2}\right)\left({-1\over 2}\right){(-x)^2\over 2!} + \left({1\over 2}\right)\left({-1\over 2}\right)\left({-3\over 2}\right){(-x)^3\over 3!} + ...
\qquad\qquad = 1 - {1\over 2}x - {1\over 8}x^2 - {1\over 16} x^3 + ...
(Expansion is infinite and approximate.)
-
- The expansion \displaystyle (1+x)^n = 1 + nx + n(n-1){x^2\over 2!} + n(n-1)(n-2){x^3\over 3!} + ... , where n is negative or a fraction, is only valid if |x| < 1.
- You can adapt the binomial expansion to include expressions of the form (a+bx)^n by simply taking out a common factor of a:
e.g. \displaystyle {1\over (3+4x)} = (3+4x)^{-1} = \left[3\left(1+{4x\over 3}\right)\right]
\displaystyle \qquad\qquad\qquad\qquad\qquad\qquad = 3^{-1}\left(1+{4x\over 3}\right)^{-1} - You can use knowledge of partial fractions to expand more difficult expressions, e.g.
\displaystyle {7+x\over (3-x)(2+x)} = {2\over(3-x)}+{1\over (2+x)}
\qquad\qquad\qquad\quad = 2(3-x)^{-1} + (2+x)^{-1}
\displaystyle \qquad\qquad\qquad\quad = {2\over 3}\left(1-{x\over 3}\right)^{-1} + {1\over 2}\left(1-{x\over 2}\right)^{-1}
Chapter 4 summary - Differentiation
- When a relation is described by parametric equations:
- You differentiate x and y with respect to the parameter t .
- Then you use the chain rule rearranged into the form \displaystyle {{\rm d}y\over {\rm d}x} = {{\rm d}y\over {\rm d}t} \div {{\rm d}x\over {\rm d}t}.
- When a relation is described by an implicit equation:
- Differentiate each term in turn, using the chain rule and product and quotient rules as appropriate.
- \displaystyle {{\rm d}\over {\rm d}x}(y^n) = ny^{n-1}{{\rm d}y\over {\rm d}x}
- \displaystyle {{\rm d}\over {\rm d}x}(xy) = x{{\rm d}\over {\rm d}x}(y) + y{{\rm d}\over {\rm d}x}(x) = x{{\rm d}y\over {\rm d}x}+y
By the chain rule.
By the product rule.
- Differentiate each term in turn, using the chain rule and product and quotient rules as appropriate.
- In an implicit equation:
- Note that when {\rm f}(y) is differentiated with respect to x it becomes \displaystyle {\rm f}'(y){{\rm d}y\over {\rm d}x}.
- A product term such as {\rm f}(x)\cdot {\rm g}(y) is differentiated by the product rule and becomes \displaystyle {\rm f}(x)\cdot {\rm g}'(y){{\rm d}y\over {\rm d}x} + {\rm g}(y)\cdot {\rm f}'(x)
- You can differentiate the function {\rm f}(x) = a^x:
- If y=a^x , then \displaystyle {{\rm d}y\over {\rm d}x} = a^x \ln a
- You can use the chain rule once, or several times, to connect the rates of change in a question involving more than two variables.
- You can set up simple differential equations from information given in context. This may involve using connected rates of change, or ideas of proportion.
Chapter 5 summary - Vectors
- A vector is a quantity that has both magnitude and direction.
- Vectors that are equal have both the same magnitude and the same direction.
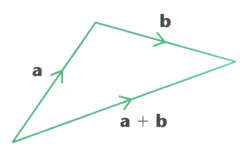
- Two vectors are added using the 'triangle law'.
- Adding the vectors \overrightarrow {PQ} and \overrightarrow {QP} gives the zero vector {\bf 0}.
\Bigl(\overrightarrow {PQ} + \overrightarrow {PQ} = {\bf 0}\Bigr) - The modulus of a vector is another name for its magnitude.
- The modulus of the vector {\bf a} is written as |{\bf a}|.
- The modulus of the vector \overrightarrow {PQ} is written as |\overrightarrow {PQ}|
- The vector -{\bf a} has the same magnitude as the vector {\bf a} but is in the opposite direction.
- Any vector parallel to the vector {\bf a} may be written as \lambda{\bf a}, where \lambda is a non-zero scalar.
- {\bf a} - {\bf b} is defined to be {\bf a} + (-{\bf b}).
- A unit vector is a vector which has magnitude (or modulus) 1 unit.
- If \lambda{\bf a} + \mu{\bf b} = \alpha{\bf a} + \beta{\bf b}, and the non-zero vectors {\bf a} and {\bf b} are not parallel, then \lambda = \alpha and \mu = \beta.
- The position vector of a point A is the vector \overrightarrow {OA} , where O is the origin. \overrightarrow {OA} is usually written as vector {\bf a}.
- \overrightarrow {AB} = {\bf b} - {\bf a}, where {\bf a} and {\bf b} are the position vectors of A and B respectively.
- The vectors {\bf i}, {\bf j} and {\bf k} are unit vectors parallel to the x-axis, the y-axis and the z-axis and in the direction of x increasing, y increasing and z increasing, respectively.
- The modulus (or magnitude) of x{\bf i} + y{\bf j} is \sqrt {x^2+y^2}.
- The vector x{\bf i} + y{\bf j} + z{\bf k} may be written as a column matrix \pmatrix{x \cr y \cr z}.
- The distance from the origin to the point (x,y,z) is \sqrt {x^2 + y^2 + z^2}.
- The distance between the points (x_1, y_1, z_1) and (x_2, y_2, z_2) is \sqrt {(x_1 - x_2)^2 + (y_1 - y_2)^2 + (z_1-z_2)^2} .
- The modulus (or magnitude) of x{\bf i} + y{\bf j} + z{\bf k} is \sqrt {x^2 + y^2 + z^2}.
- The scalar product of two vectors {\bf a} and {\bf b} is written as {\bf a}.{\bf b} , and defined by
{\bf a}.{\bf b} = |{\bf a}||{\bf b}| \cos \theta
where \theta is the angle between {\bf a} and {\bf b} . - If {\bf a} and {\bf b} are the position vectors of the points A and B, then
\displaystyle \cos AOB = {{\bf a}.{\bf b}\over |{\bf a}||{\bf b}|} - The non-zero vectors {\bf a} and {\bf b} are perpendicular if and only if {\bf a}.{\bf b} = 0.
- If {\bf a} and {\bf b} are parallel, {\bf a}.{\bf b} = |{\bf a}||{\bf b}|.
- In particular, {\bf a}.{\bf a} = |{\bf a}|^2
- If {\bf a} = a_1{\bf i} + a_2{\bf j} + a_3{\bf k} and {\bf b} = b_1{\bf i} + b_2{\bf j} + b_3{\bf k}
{\bf a}.{\bf b} = \pmatrix{a_1 \cr a_2 \cr a_3} \cdot \pmatrix{b_1 \cr b_2 \cr b_3} = a_1b_1 + a_2b_2 + a_3b_3 - A vector equation of a straight line passing through the point A with position vector {\bf a} , and parallel to the vector {\bf b} , is
{\bf r} = {\bf a} + t{\bf b}
where t is a scalar parameter. - A vector equation of a straight line passing through the points C and D, with position vectors {\bf c} and {\bf d} respectively, is
{\bf r} = {\bf c} + t({\bf d}-{\bf c})
where t is a scalar parameter. - The acute angle \theta between two straight lines is given by
\displaystyle \cos \theta = \left|{{\bf a}.{\bf b}\over |{\bf a}||{\bf b}|}\right|
where {\bf a} and {\bf b} are direction vectors of the lines.
Chapter 6 summary - Integration
- You should be familiar with the following integrals.
\displaystyle \int x^n = {x^{n+1}\over n+1} + C
\displaystyle \int {\rm e}^x = {\rm e}^x + C
\displaystyle \int {1\over x} = \ln |x| + C
\displaystyle \int \cos x = \sin x + C
\displaystyle \int \sin x = -\cos x + C
\displaystyle \int \sec^2 x = \tan x + C
\displaystyle \int {\rm co}\sec\cot x = -{\rm co}\sec x + C
\displaystyle \int {\rm co}\sec^2 x = -\cot x + C
\displaystyle \int \sec x\tan x = \sec x + C - Using the chain rule in reverse you can obtain generalisations of the above formulae.
\displaystyle \int f'(ax+b)dx = {1\over a}f(ax+b) + C
\displaystyle \int (ax+b)^ndx = {1\over a}{(ax+b)^{n+1}\over n+1} + C
\displaystyle \int {\rm e}^{ax+b}dx = {1\over a}{\rm e}^{ax+b} + C
\displaystyle \int {1\over (ax+b)}dx = {1\over a} \ln|ax+b| + C
\displaystyle \int \cos(ax+b)dx = {1\over a}\sin(ax+b) + C
\displaystyle \int \sin(ax+b)dx = -{1\over a}\cos(ax+b) + C
\displaystyle \int \sec^2(ax+b)dx = {1\over a}\tan(ax+b) + C
\displaystyle \int {\rm co}\sec(ax+b)cot(ax+b)dx = -{1\over a}{\rm co}\sec(ax+b) + C
\displaystyle \int {\rm co}\sec^2(ax+b)dx = -{1\over a}\cot(ax+b) + C
\displaystyle \int \sec(ax+b)\tan(ax+b)dx = {1\over a}\sec(ax+b) + C - Sometimes trigonometric identities can be useful to help change the expression into one you know how to integrate.
e.g. To integrate \sin^2x or \cos^2x use formula for \cos2x , so
\displaystyle \int \sin^2x{\rm d}x = \int \left({1\over 2}-{1\over 2}\cos2x\right){\rm d}x - You can use partial fractions to integrate expressions of the type \displaystyle {x-5\over (x+1)(x-2)}.
- You should remember the following general patterns:
\displaystyle \int {{\rm f}'(x)\over {\rm f}(x)}{\rm d}x = \ln |{\rm f}(x)| + C
\displaystyle \int {\rm f}'(x)[{\rm f}(x)]^n{\rm d}x = {1\over n+1}[{\rm f}(x)]^{n+1}; n \not= -1 - Sometimes you can simplify an integral by changing the variable. This process is similar to using the chain rule in differentiation and is called integration by substitution.
- Integration by parts:
\displaystyle \int u {{\rm d}v\over {\rm d}x}{\rm d}x = uv - \int v {{\rm d}u\over {\rm d}x}{\rm d}x - \displaystyle \int \tan x {\rm d}x = \ln |\sec x| + C
\displaystyle \int \sec x {\rm d}x = \ln |\sec x + \tan x| + C
\displaystyle \int \cot x {\rm d}x = \ln |\sin x| + C
\displaystyle \int {\rm co}\sec x {\rm d}x = -\ln|{\rm co}\sec x + \cot x| + C - Remember: the trapezium rule is
\displaystyle \int_a^b y {\rm d}x \approx {1\over 2}h [y_0 + 2(y_1 + y_2 + ... + y_{n-1}) + y_n] where \displaystyle h = {b-a\over n} and y_i=f(a+ih). - Area of region between y={\rm f}(x) , the x-axis and x=a and x=b is given by:
Area \displaystyle = \int_a^b y {\rm d}x
- Volume of revolution formed by rotating y about the x-axis between x=a and x=b is given by:
Volume \displaystyle = \pi \int_a^b y^2 {\rm d}x - When \displaystyle {{\rm d}y\over {\rm d}x} = {\rm f}(x){\rm g}(y) you can write
\displaystyle \int {1\over {\rm g}(y)}{\rm d}y = \int {\rm f}(x) {\rm d}x This is called separating the variables.
|
http://maths.adibob.com/ This site is not endorsed by Heinemann or edexcel in any way. Site produced by Adrian Lowdon. Email adi@adibob.com |