FP1 summary

Chapter 1 summary - Inequalities
- Critical values of x for an inequality such as {\rm f}(x) > 0 are those values of x where the sign of {\rm f}(x) changes for values of x on either side of the critical value.
- Avoid multiplying an inequality by an expression which could be positive or negative.
- When using a graphical calulator to solve an inequality, reproduce a rough sketch in your solution to illustrate your method.
- Use a graphical approach to solve inequalities containing the modulus sign.
Chapter 2 summary - Series
- \displaystyle \sum_{r=1}^n 1 = n
- \displaystyle \sum_{r=1}^n r = {1\over 2}n(n+1)
- If u_r \equiv {\rm f}(r + 1) - {\rm f}(r), then
\displaystyle \sum_{r=1}^n u_r = {\rm f}(n+1)-{\rm f}(1) - \displaystyle \sum_{r=1}^n r^2 = {1\over 6}n(n+1)(2n+1)
- \displaystyle \sum_{r=1}^n r^3 = {1\over 4}n^2(n+1)^2 = \left[\sum_{r=1}^n r\right]^2
- \displaystyle \sum_{r=1}^n r(r+1) = {1\over 3}n(n+1)(n+2)
Chapter 3 summary - Complex numbers
- \sqrt {-1} = {\rm i}
- A number of the form b{\rm i}, where b is real, is called a pure imaginary number.
- A number of the form a+b{\rm i}, where a, b \in \Re, is called a complex number.
- If z = x+{\rm i}y then the complex conjugate of z is z^\ast = x-{\rm i}y.
- Any complex number can be represented by either a point or a vector on an Argand diagram.
- If z = x+{\rm i}y then the modulus of z is
|z| = \sqrt {x^2 + y^2} - If z = x+{\rm i}y then \arg z is the principal value of the argument of z.
- If a+{\rm i}b = c+{\rm i}d, where a, b, c, d \in \Re, then a=c and b=d.
- If z = x + {\rm i}y = r(\cos \theta + {\rm i}\sin \theta)
where -\pi \leq \theta \leq \pi and \theta is the angle that the vector representing z on an Argand diagram makes with the positive x-axis then
x = r\cos \theta \qquad y = r\sin \theta
r = \sqrt {x^2 + y^2} - If z_1 = r_1(\cos \theta_1 + {\rm i}\sin \theta_1) and z_2 = r_2(\cos \theta_2 + {\rm i}\sin \theta_2) then
z_1 z_2 = r_1 r_2 [\cos(\theta_1 + \theta_2) + {\rm i}\sin (\theta_1 + \theta_2)]
\displaystyle {z_1\over z_2} = {r_1\over r_2} [\cos(\theta_1 - \theta_2) + {\rm i}\sin (\theta_1 - \theta_2)]
|z_1 z_2| = |z_1||z_2|
\displaystyle \left|{z_1\over z_2}\right| = {|z_1|\over |z_2|}
\arg (z_1 z_2) = \arg z_1 + \arg z_2
\displaystyle \arg {z_1\over z_2} = \arg z_1 - \arg z_2 - If the polynomial equation {\rm f}(z) = 0, with real coefficients, has a root a + b{\rm i}, where a, b \in \Re, then the conjugate a - b{\rm i} is also a root of the equation {\rm f}(z) = 0.
Chapter 4 summary - Numerical solution of equations
- In order to find a root of the equation {\rm f}(x) = 0 by iteration, the equation must first be arranged in the form x = {\rm g}(x). An iteration formula is then
x_{n+1} = {\rm g}(x_n) - To find a root of an equation {\rm f}(x) = 0 by linear interpolation, use a straight line to join two points with x-coordinates a and b on the graph of y = {\rm f}(x) that lie on opposite sides of the x-axis. Take the point where the line cuts the x-axis as a first approximation \alpha_1 to the root \alpha and work out its value by similar triangles. Work out {\rm f}(\alpha_1) to find out whether the root lies in the interval [a, \alpha_1] or [\alpha_1, b] and repeat the process on the appropriate interval to find a closer approximation to \alpha, etc.
- Interval bisection: If a root \alpha of the equation {\rm f}(x) = 0 lies in the interval [a,b], the mid-point \displaystyle {a+b\over 2} is a first approximation to \alpha. Calculate {\rm f}(a), {\rm f}(b) and \displaystyle {\rm f}\left({a+b\over 2}\right) to find out whether the root lies in the interval \displaystyle \left[a,{a+b\over 2}\right] or \displaystyle \left[{a+b\over 2},b\right] and then find the mid-point of the appropriate interval to find a close approximation to \alpha, etc.
- The Newton-Raphson process:
If a is a first approximation to a root of {\rm f}(x) = 0, then
\displaystyle a - {{\rm f}(a)\over {\rm f}'(a)}
is in general a better approximation.
Chapter 5 summary - First order differential equations
- The general solution of the differential equation \displaystyle {{\rm d}y\over {\rm d}x} = {\rm f}(x){\rm g}(y) is
\displaystyle \int {1\over {\rm g}(y)} {\rm d}y = \int {\rm f}(x) {\rm d}x + C
provided that \displaystyle {1\over {\rm g}(y)} can be integrated with respect to y and {\rm f}(x) can be integrated with respect to x. C is an arbitrary constant. - In the general solution of a differential equation, different values of the arbitrary constant C, arising from different initial conditions, give rise to a series of equations whose graphs when sketched are called a family of solution curves for the differential equation.
- An exact first order differential equation is one that can be integrated directly as it stands without any processing.
- The first order linear differential equation
\displaystyle {{\rm d}y\over {\rm d}x} + Py = Q
where P and Q are functions of x, is made into an exact first order differential equation by multiplying the equation by the integrating factor {\rm e}^{\int P {\rm d}x}, provided that {\rm e}^{\int P {\rm d}x} and the integral of {\rm e}^{\int P {\rm d}x} Q(x) exist.
The general solution is then
\displaystyle y{\rm e}^{\int P {\rm d}x} = \int Q{\rm e}^{\int P {\rm d}x}{\rm d}x + C
where C is an arbitrary constant.
Chapter 6 summary - Second order differential equations
- For the second order differential equation
\displaystyle a {{\rm d}^2y\over {\rm d}x^2} + b{{\rm d}y\over {\rm d}x} + cy = 0
the auxiliary quadratic equation is
am^2 + bm + c = 0
- If the auxiliary quadratic equation has real distinct roots \alpha and \beta (condition b^2 > 4ac), then the general solution is
y = A{\rm e}^{\alpha x} + B{\rm e}^{\beta x}
where A and B are constants. - If the auxiliary quadratic equation has real coincident roots \alpha (condition b^2 = 4ac), then the general solution is
y = (A+Bx){\rm e}^{\alpha x}
where A and B are constants. - If the auxiliary quadratic equation has pure imaginary roots \pm n{\rm i}, arising from m^2 + n^2 = 0, the general solution is
y = A\cos nx + B\sin nx
where A and B are constants and n \in \Re. - If the auxiliary quadratic equation has complex cojungate roots p \pm {\rm i}q, p, q \in \Re (condition b^2 < 4ac), the general solution is
y={\rm e}^{px}[A\cos qx + B\sin qx]
where A and B are constants.
- If the auxiliary quadratic equation has real distinct roots \alpha and \beta (condition b^2 > 4ac), then the general solution is
- For the differential equation
\displaystyle a {{\rm d}^2y\over {\rm d}x^2} + b{{\rm d}y\over {\rm d}x} + cy = {\rm f}(x)
where a, b and c are constants, the complementary function is the general solution of the differential equation \displaystyle a {{\rm d}^2y\over {\rm d}x^2} + b{{\rm d}y\over {\rm d}x} + cy = 0 and a particular integral is any solution (i.e. function of x) that satisfies the differential equation
\displaystyle a {{\rm d}^2y\over {\rm d}x^2} + b{{\rm d}y\over {\rm d}x} + cy = {\rm f}(x)
The general solution of the differential equation is
y = complementary function + particular integral - A change of variable given by a substitution can transform a differential equation from one in say (x,y) which is not immediately integrable into a differential equation in say (x,v) which is immediately integrable or a recognised equation for which a method of solution has already been learned.
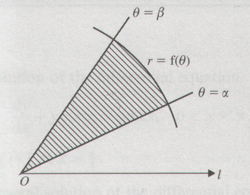
Chapter 7 summary - Polar coordinates
- For the curve with polar equation r = {\rm f}(\theta), area of shaded region \displaystyle = {1\over 2} \int_\alpha^\beta r^2 {\rm d}\theta = {1\over 2} \int_\alpha^\beta [{\rm f}(\theta)]^2 {\rm d}\theta
- For tangents parallel to \displaystyle l, {{\rm d}\over {\rm d}\theta}(r\sin \theta) = 0
For tangents perpendicular to \displaystyle l, {{\rm d}\over {\rm d}\theta}(r\cos \theta) = 0
|
http://maths.adibob.com/ This site is not endorsed by Heinemann or edexcel in any way. Site produced by Adrian Lowdon. Email adi@adibob.com |