M3 summary

Chapter 1 summary - Further kinematics
- For a particle P moving in a straight line, which at time t seconds has a displacement x metres from a fixed point O of the line, the acceleration a {\rm ms}^{-2} and the velocity v {\rm ms}^{-1} as functions of time are given by:
\displaystyle a = {{\rm d}v\over {\rm d}t}
\displaystyle v = {{\rm d}x\over {\rm d}t}
\displaystyle a = {{\rm d}^2x\over {\rm d}t^2} - When the acceleration is a function of the displacement then:
\displaystyle a = v{{\rm d}v\over {\rm d}x} = {{\rm d}\over {\rm d}x}\left({1\over 2}v^2\right)
Chapter 2 summary - Elastic springs and strings
- Elastic springs and strings have a tension or thrust, T, given by:
\displaystyle T = {\lambda x\over l}
where \lambda is the modulus of elasticity, x the extension or compression and l the natural length of the string or spring. This is known as Hooke's law. - The work done in stretching (or compressing) an elastic string (or spring) with modulus \lambda from its natural length l to a length (l+x) (or (l-x)) is \displaystyle {\lambda x^2\over 2l}.
- The elastic energy (E.P.E.) in a string (or spring) of modulus \lambda extended (or compressed) by a length x beyond its natural length is also \displaystyle {\lambda x^2\over 2l}.
- The total change of the mechanical energies (that is kinetic, gravitational potential and elastic potential energies) of a system is equal to the work done by any external forces acting on the system.
Chapter 3 summary - Further dynamics
- For a particle of mass m moving in a straight line under the influence of a force F = {\rm F}(t)
\displaystyle m{{\rm d}v\over {\rm d}t} = {\rm F}(t) - For a particle of mass m moving in a straight line under the influence of a force F = {\rm G}(x)
\displaystyle m{{\rm d}\over {\rm d}x}\left({1\over 2}v^2\right) = {\rm G}(x) - The impulse of a variable force {\rm F}(t) acting over the time interval t_1 to t_2 is:
\displaystyle \int_{t_1}^{t_2} {\rm F}(t){\rm d}t - The work done by a variable force {\rm G}(x) which moves its point of application from x_1 to x_2 is:
\displaystyle \int_{x_1}^{x_2} {\rm G}(x){\rm d}x - A particle which moves on a straight line so that its acceleration is always towards a fixed point O in the line and is proportional to its displacement from O is said to move with simple harmonic motion or S.H.M.
This is written as \qquad \ddot x = -\omega^2x
The maximum displacement of the particle from O is the amplitude, a, of the motion.
The period of the motion is \displaystyle {2\pi\over \omega}
The speed, v, at any point is given by
v^2 = \omega^2(a^2 - x^2)
and \qquad x = a\sin \omega t if x=0 when t=0 \qquad x = a\cos \omega t if x=a when t=0 \qquad x = a\sin (\omega t + \alpha) if x is at some other point when t=0 - A particle attached to the end of an elastic spring which is displaced from its equilibrium position and then allowed to move under the influence of the tension or thrust only will move with S.H.M.
If the particle is attached to a string, the motion will be simple harmonic only when the string is taut.
Chapter 4 summary - Circular motion
- When a particle P is moving on a circle centre O and the angle between OP and a fixed radius OA is \theta, the angular speed of OP is \omega where
\displaystyle \omega = {{\rm d}\theta\over {\rm d}t} - Angular speed is usually measured in radians per second (rad s-1) or revolutions per minute (rev min-1).
- The linear speed v of the particle is directed along the tangent to the circular path.
- The linear and angular speeds are connected by the relationship
v = r\omega
where r is the radius of the circular path. - When r is measured in metres and \omega in radians per second, v is in metres per second.
- A particle moving in a circular path at a constant speed has an acceleration of magnitude a directed towards the centre of the circle where a is given by
\displaystyle a = r\omega^2 or \displaystyle a = {v^2\over r} - The resultant force {\bf F} acting on a particle of mass m moving on a circular path with constant speed has magnitude mr\omega^2 or \displaystyle {mv^2\over r} and is directed towards the centre of the circle.
- A surface which is inclined at an angle to the horizontal is said to be banked.
Motion of a particle in a vertical circle
- A particle which is moving in a vertical circle has variable speed.
- The acceleration of a particle moving in a circle of radius r with speed v at time t has two components:
\displaystyle {v^2\over r} towards the centre of the circle
and \displaystyle {{\rm d}v\over {\rm d}t} along the tangent. - The component of the force along the radius does no work during the motion.
- By the work-energy principle, the sum of the K.E. and P.E. of the particle is constant throughout the motion.
- A particle which cannot leave its vertical circular path (for example a particle on a rod) will describe complete circles provided its velocity at the highest point of the circle is greater than or equal to zero.
- A particle which can leave its vertical circular path (for example a particle on a string) will do so when the force towards the centre of the circle becomes zero.
Chapter 5 summary - Statics of rigid bodies
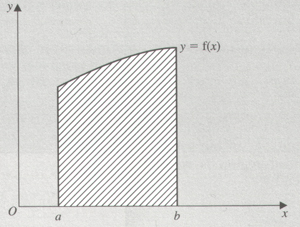
The coordinates (\bar x, \bar y) of the centre of mass of the shaded region are given by:
\displaystyle \left[\int_a^b {\rm f}(x){\rm d}x\right]\bar x = \int_a^b x{\rm f}(x){\rm d}x
\displaystyle \left[\int_a^b {\rm f}(x){\rm d}x\right]\bar y = {1\over 2} \int_a^b [{\rm f}(x)]^2{\rm d}x- The centre of mass of a solid body is the point at which the weight acts.
The weight of a uniform solid body is evenly distributed throughout its volume.
The centre of mass of a uniform solid body must lie on any axis of symmetry.
The centre of mass of a uniform solid body must lie on any plane of symmetry.
The centre of mass of a system of n masses, m_1, m_2, ..., m_n at points with coordinates (x_1, y_1, z_1), (x_2, y_2, z_2), ..., (x_n, y_n, z_n) has coordinates (\bar x, \bar y, \bar z) where
\displaystyle \bar x = {\sum m_i x_i\over \sum m_i}
\displaystyle \bar y = {\sum m_i y_i\over \sum m_i}
\displaystyle \bar z = {\sum m_i z_i\over \sum m_i} 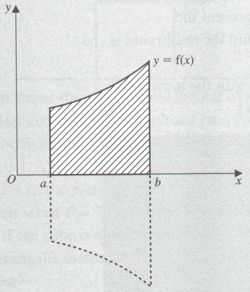
The x-coordinate of the centre of mass, \bar x, of the solid of revolution generated when the shaded region is rotated through 360° about the x-axis is given by:
\displaystyle M\bar x = \left[\int_a^b \rho \pi y^2 {\rm d}x \right]\bar x = \int_a^b \rho \pi y^2x {\rm d}x- Standard results for uniform bodies
Body Centre of mass Solid hemisphere, radius r {3\over 8}r from centre Hemispherical shell, radius r {1\over 2}r from centre Circular arc, radius r, angle at centre 2\alpha \displaystyle {r\sin \alpha \over \alpha} from centre Sector of circle, radius r, angle at centre 2\alpha \displaystyle {2r \sin \alpha \over 3\alpha} from centre Solid right circular cone, height h \displaystyle {3h\over 4} from vertex Conical shell, height h \displaystyle {2\lambda\over 3} from vertex - A rigid body is in equilibrium if:
- the vector sum of the forces acting is zero, that is the sum of the components of the forces in any given direction is zero.
- the algebraic sum of the moments of the forces about any given point is zero.
- A rigid body hangs in equilibrium with its centre of mass vertically below the point of suspension.
For a body in contact with a horizontal or inclined plane to be in equilibrium, the line of action of the weight, through the centre of mass, must lie inside the area of contact. - To decide if equilibrium will be broken by sliding or toppling two cases need to be examined:
- when the body is on the point of sliding so that F=\mu R
- when the body is on the point of toppling, so that the reaction acts at the point about which the body will turn.
|
http://maths.adibob.com/ This site is not endorsed by Heinemann or edexcel in any way. Site produced by Adrian Lowdon. Email adi@adibob.com |