M2 summary

Chapter 1 summary - Kinematics of a particle moving in a straight line or plane
- Projectiles
The horizontal speed of a projectile is unchanged throughout the motion. The vertical motion is subject to an acceleration of magnitude g = 9.8 {\rm ms}^{-2} vertically downwards. The four uniform acceleration equations apply (see M1 summary). - Variable acceleration
For variable acceleration the relationships between the displacement x, velocity v and acceleration a of a particle are shown by:
Differentiate with respect to t \displaystyle \left\Downarrow \qquad \matrix { x \cr | \cr v \cr | \cr a} \qquad \right\Uparrow Integrate with respect to t If: \qquad {\bf r} = x{\bf i} + y{\bf j} then: \qquad \dot {\bf r} = \dot x{\bf i} + \dot y{\bf j} and: \qquad \ddot {\bf r} = \ddot x{\bf i} + \ddot y{\bf j} - If the position vector {\bf r} of a particle is given
then: \displaystyle \qquad {\bf v} = \dot {\bf r} = {{\rm d}{\bf r}\over {\rm d}t} and: \qquad {\bf a} = \dot {\bf v} = \ddot {\bf r}
\displaystyle \qquad \quad = {{\rm d}{\bf v}\over {\rm d}t} = {{\rm d}^2 {\bf r}\over {\rm d}t^2} - The speed of a particle is the magnitude of its velocity vector, that is:
\text {speed} = |{\bf v}|
Chapter 2 summary - Centres of mass
- The centre of mass of a lamina is the point at which the weight acts.
The weight of a uniform lamina is evenly distributed.
The centre of mass for a lamina or discrete mass distribution must lie on any axis of symmetry.
The centre of mass of a set of n masses m_1, m_2, ..., m_n at points with coordinates (x_1, y_1), (x_2, y_2), ..., (x_n, y_n) has coordinates (\bar x, \bar y) where:
\displaystyle \qquad \bar x = {\sum m_ix_i\over \sum m_i} and: \displaystyle \qquad \bar y = {\sum m_iy_i\over \sum m_i}
- Standard results:
Body Centre of mass Uniform rod mid-point of rod Uniform rectangular lamina point of intersection of lines joining mid-points of opposite sides Uniform circular disc centre of circle Uniform triangular lamina point of intersection of medians - in other words {2\over 3} distance from any vertex to the mid-point of the opposite side Circular arc, radius r, angle at centre 2\alpha \displaystyle {r \sin \alpha\over \alpha} from centre Sector of circle, radius r, angle at centre 2\alpha \displaystyle {2r\sin\alpha\over 3\alpha} from centre - For a lamina which is freely suspended and hangs in equilibrium, the centre of mass will be vertically below the point of suspension.
For a lamina which is balanced on an inclined plane, the line of action of the weight must fall within the side of the lamina that is in contact with the plane.
Chapter 3 summary - Work, energy and power
- Work
For a force acting in the direction of the motion:
Work done = force × distance moved
For a force acting in a direction other than that of the motion:
Work done = component of the force in the direction of the motion × distance moved in the same direction
A force of 1 newton (N) does 1 joule (J) of work when moving a particle a distance of 1 metre. - Energy
The kinetic energy (K.E.) of a body of mass m moving with speed v {\rm ms}^{-1} is given by:
\text {K.E.} = {1\over 2}mv^2
For a mass in kg and velocity in ms-1 the K.E. is measured in joules (J). K.E. is never negative.
The potential energy (P.E.) of a body of mass m at a height h above a chosen level is given by
\text {P.E.} = mgh
Potential energy is also measured in joules. P.E. can be negative.
The work done on a body is equal to its change of mechanical energy which is K.E. + P.E. - Conservation of energy
If the weight of the particle is the only force having a component in the direction of motion then throughout the motion:
K.E. + P.E. = constant - Power
Power is the rate of doing work.
For a moving particle:
Power = driving force × speed
Power is measured in watts, where 1 watt (W) is 1 joule per second, or kilowatts, where 1 kilowatt (kW) is 1000 watts.
Chapter 4 summary - Collisions
- Conservation of linear momentum
When two particles collide:
total momentum before the collision = total momentum after the collision
m_1u_1 + m_2u_2 = m_1v_1 + m_2v_2
Before collision:
After collision: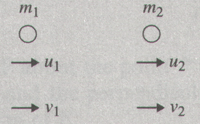
- Newton's law of restitution
{\text {speed of separation of particles}\over \text {speed of approach of particles}} = e
where e is the coefficient of restitution between the particles. - Impact of a particle normally with a fixed surface.
Before impact:
After impact: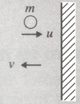
(speed of rebound) = e (speed of approach)
where e is the coefficient of restitution between the particle and the surface.
Chapter 5 summary - Statics of rigid bodies
- A rigid body is in equilibrium if:
- the vector sum of the forces acting is zero, that is the sum of the components of the forces in any given direction is zero.
- the algebraic sum of the moments of the forces about any given point is zero.
- Only in the case of limiting equilibrium, when motion is on the point of taking place, does the frictional force F have its maximum value \mu R.
|
http://maths.adibob.com/ This site is not endorsed by Heinemann or edexcel in any way. Site produced by Adrian Lowdon. Email adi@adibob.com |